






CAN(Controller Area Network) 버스는 차량/기계에서 ECU(Electronic Control Unit)가 호스트 컴퓨터 없이도 서로 통신할 수 있도록 하는 통신 시스템입니다. 예를 들어, CAN 버스는 차량의 브레이크와 엔진 간의 빠르고 안정적인 정보 공유를 가능하게 합니다.
자동차를 인체라고 상상해보세요.
CAN 버스는 신경계 통신을 허용하다
ECU(CAN 노드라고도 함)는 CAN 버스를 통해 서로 연결된 신체 부위와 같습니다. 한 부위에서 감지된 정보는 다른 부위와 공유될 수 있습니다.
물리적으로 모든 ECU는 꼬인 쌍선(CAN High 및 CAN Low)으로 구성된 2선 버스에 연결됩니다. 각 선은 일반적으로 색상으로 구분됩니다. CAN High는 노란색(태양을 상징), CAN Low는 녹색(잔디를 상징)입니다.

PEAK 시스템 PCAN-USB CAN USB 어댑터

PCAN-USB 인터페이스를 통해 CAN 네트워크에 간편하게 연결할 수 있습니다. 콤팩트한 플라스틱 하우징으로 휴대형 애플리케이션에 적합합니다. 광분리형 버전은 PC와 CAN 측 사이에 최대 500V의 갈바닉 절연을 보장합니다. CAN 연결 애플리케이션 개발을 위한 PCAN-View 모니터링 소프트웨어와 PCAN-Basic 프로그래밍 인터페이스가 공급 범위에 포함되어 있으며, CAN FD를 지원합니다. 다양한 운영 체제용 장치 드라이버가 제공되므로 프로그램에서 연결된 CAN 버스에 쉽게 액세스할 수 있습니다.

전자 제어 장치(ECU)는 엔진, 변속기, 브레이크, 조향 장치, 온도 등과 같은 특정 기능을 제어하는 구성 요소입니다. 최신 자동차에는 쉽게 70개 이상의 ECU – 각 ECU는 버스 상의 다른 ECU와 정보를 공유합니다.
CAN 버스에 연결된 모든 ECU는 정보(예: 센서 데이터)를 준비하고 전송할 수 있습니다. 전송된 데이터는 네트워크 상의 다른 모든 ECU에서 수신되며, 각 ECU는 데이터를 검토하여 수신 여부를 결정할 수 있습니다.
확대해서 보면 ECU는 세 가지 주요 구성 요소로 이루어져 있습니다.


CAN 버스에 연결하는 방법은?
CAN 버스 애플리케이션에는 표준 커넥터가 없습니다. 나중에 설명하겠지만, 이는 차량/기계마다 다른 커넥터를 사용할 수 있음을 의미합니다.
그러나 가장 유력한 후보는 CAN DB9(D-sub9) 커넥터(CANopen CiA 303-1)로, CAN 버스 데이터 로거/인터페이스를 포함한 많은 애플리케이션의 사실상 표준이 되었습니다.

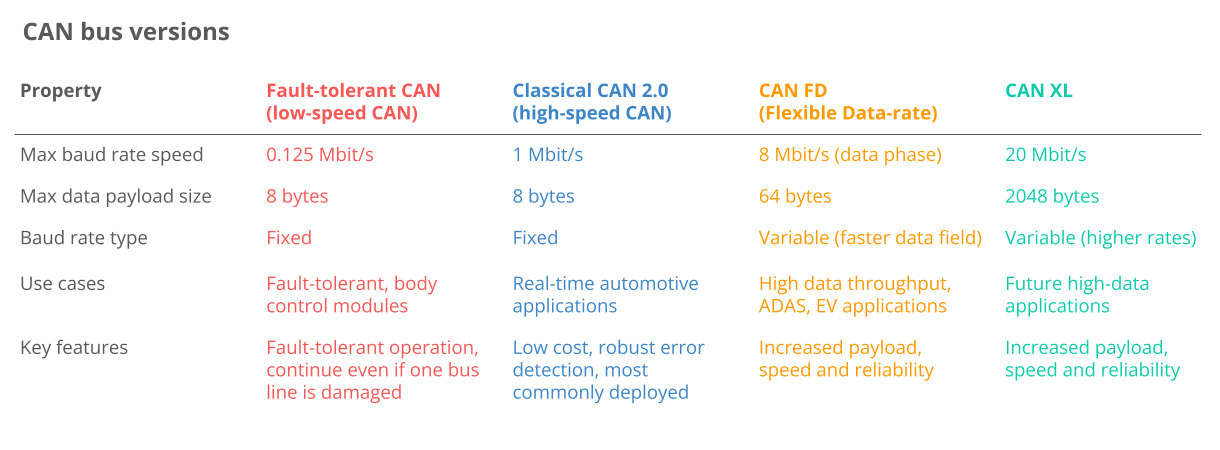
계속하기 전에 CAN에는 다양한 변형이 있다는 것을 알아야 합니다.
CAN 버스 표준은 다음과 같은 주요 이점 때문에 대부분의 차량과 여러 기계에 사용됩니다.

ECU는 복잡한 직접 아날로그 신호 경로 대신 단일 CAN 시스템을 통해 통신하므로 오류, 무게, 배선 및 비용이 줄어듭니다.

CAN 버스는 모든 네트워크 ECU와 통신할 수 있는 '단일 진입점'을 제공하여 중앙 진단, 데이터 로깅 및 구성 세부 정보를 허용합니다.

이 시스템은 전자파 간섭 및 전자파 간섭에 강합니다. 안전이 중요한 애플리케이션(예: 차량)에 이상적입니다.

CAN 프레임은 ID별로 우선순위가 지정되므로 우선순위가 가장 높은 데이터가 다른 프레임을 방해하지 않고 즉시 버스에 액세스할 수 있습니다.

오늘날 CAN은 자동차의 표준입니다. 자동차 , 트럭 , 버스, 트랙터, …), 배 , 비행기, EV 배터리 , 기계 , 등.



앞으로도 CAN 버스 프로토콜은 관련성을 유지할 것입니다. 그러나 영향을 받을 것입니다. 주요 트렌드 :
개방형 vs. 폐쇄형: '오픈 소스'에 대한 추진과 예를 들어 구독 기반 마이크로 서비스를 제공하기 위해 독점 데이터에 대한 OEM 주도의 요구에 반대합니다.
니드 포 스피드: 더 높은 데이터 속도에 대한 필요성으로 인해 CAN FD, CAN XL 또는 자동차 이더넷으로의 전환이 촉진될 수 있습니다.
문의해주세요 세미키 귀하의 요구 사항에 맞는 올바른 CAN 장치 라인을 선택하는 데 대한 조언을 받으세요
연락하다:
세미키 측정장비 주식회사
Email: [email protected]
전화: +84 9797 61016









