






CAN bus (Mạng Khu vực Điều khiển) là một hệ thống truyền thông được sử dụng trong xe cộ/máy móc để cho phép các ECU (Bộ Điều khiển Điện tử) giao tiếp với nhau – mà không cần máy tính chủ. Ví dụ, CAN bus cho phép chia sẻ thông tin nhanh chóng và đáng tin cậy giữa phanh và động cơ của xe.
Hãy tưởng tượng chiếc xe của bạn giống như cơ thể con người:
Bus CAN là hệ thống thần kinh cho phép giao tiếp.
Đổi lại, ECU (hay còn gọi là ‘nút CAN’) giống như các bộ phận của cơ thể, được kết nối với nhau thông qua bus CAN. Thông tin được một bộ phận cảm nhận có thể được chia sẻ với bộ phận khác.
Về mặt vật lý, tất cả các ECU đều được kết nối trên một bus hai dây gồm một cặp dây xoắn: CAN cao và CAN thấp. Các dây thường được mã hóa màu: CAN cao màu vàng (giống như mặt trời), CAN thấp màu xanh lá cây (giống như cỏ).

Hệ thống PEAK Bộ chuyển đổi USB PCAN-USB CAN

Giao diện PCAN-USB cho phép kết nối đơn giản với mạng CAN. Vỏ nhựa nhỏ gọn của nó làm cho nó phù hợp cho các ứng dụng di động. Phiên bản tách rời quang đảm bảo cách ly điện lên tới 500 Vôn giữa PC và phía CAN. Phần mềm giám sát PCAN-View và giao diện lập trình PCAN-Basic để phát triển các ứng dụng có kết nối CAN đều nằm trong phạm vi cung cấp và hỗ trợ CAN FD. Trình điều khiển thiết bị tồn tại cho các hệ điều hành khác nhau, vì vậy các chương trình có thể dễ dàng truy cập vào bus CAN được kết nối.

Bộ điều khiển điện tử (ECU) là các thành phần điều khiển một số chức năng nhất định – ví dụ như bộ điều khiển động cơ, hộp số, phanh, lái, nhiệt độ, v.v. Một chiếc ô tô hiện đại có thể dễ dàng có hơn 70 ECU – mỗi ECU chia sẻ thông tin với các ECU khác trên xe buýt.
Bất kỳ ECU nào trên bus CAN đều có thể chuẩn bị và phát thông tin (ví dụ: dữ liệu cảm biến). Dữ liệu phát được tất cả các ECU khác trên mạng chấp nhận – và sau đó mỗi ECU có thể kiểm tra dữ liệu và quyết định nhận hay bỏ qua.
Nếu chúng ta phóng to, ECU bao gồm ba thành phần chính:


Làm thế nào để kết nối với bus CAN?
Không có đầu nối chuẩn nào cho các ứng dụng bus CAN. Như chúng tôi sẽ trình bày sau, điều này ngụ ý rằng các phương tiện/máy móc khác nhau có thể sử dụng các đầu nối khác nhau.
Tuy nhiên, một ứng cử viên gần đúng là đầu nối CAN DB9 (D-sub9) (CANopen CiA 303-1), đã trở thành tiêu chuẩn thực tế cho nhiều ứng dụng bao gồm giao diện/bộ ghi dữ liệu bus CAN.

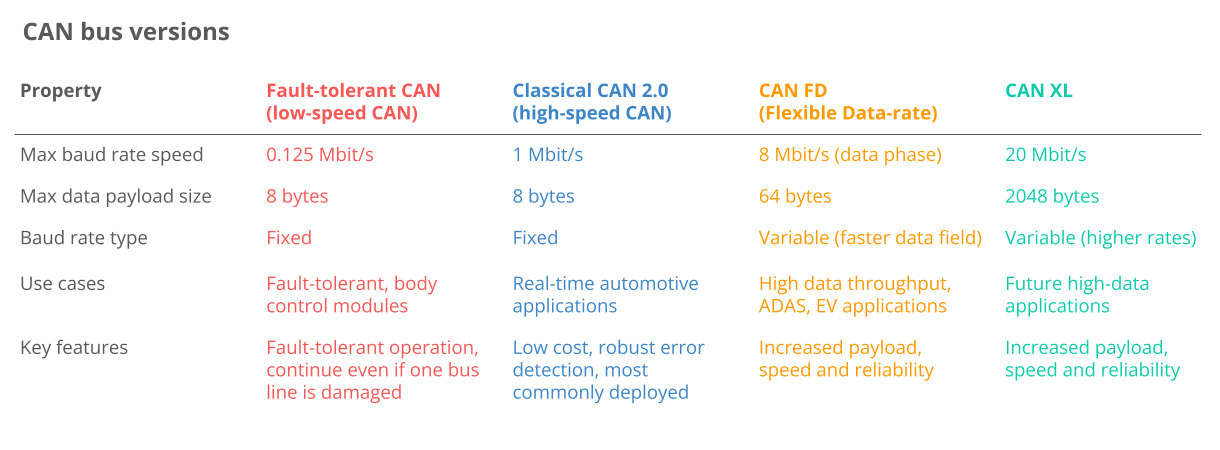
Trước khi tiếp tục, chúng ta cần biết rằng có nhiều biến thể của CAN:
Tiêu chuẩn bus CAN được sử dụng trên hầu hết các loại xe và nhiều máy móc vì những lợi ích chính sau:

ECU giao tiếp thông qua một hệ thống CAN duy nhất thay vì thông qua các đường tín hiệu tương tự phức tạp trực tiếp – giảm lỗi, trọng lượng, hệ thống dây điện và chi phí

Bus CAN cung cấp ‘một điểm vào’ để giao tiếp với tất cả các ECU mạng – cho phép chẩn đoán trung tâm, ghi dữ liệu và cấu hìnhChi tiết

Hệ thống này có khả năng chống lại nhiễu điện từ và nhiễu điện từ – lý tưởng cho các ứng dụng quan trọng về an toàn (ví dụ như xe cộ)Chi tiết

Khung CAN được ưu tiên theo ID để dữ liệu có mức độ ưu tiên cao nhất được truy cập bus ngay lập tức mà không gây gián đoạn các khung khác

Ngày nay, CAN là tiêu chuẩn trong ô tô ( ô tô , xe tải , xe buýt, máy kéo, …), tàu thủy , máy bay, pin EV , máy móc , v.v.



Nhìn về phía trước, giao thức bus CAN sẽ vẫn có liên quan – mặc dù nó sẽ bị ảnh hưởng bởi các xu hướng chính :
Mở so với đóng: Việc thúc đẩy ‘Nguồn mở’ và có thể đối đầu với nhu cầu do OEM thúc đẩy về việc giữ dữ liệu độc quyền để ví dụ như cung cấp các dịch vụ vi mô dựa trên đăng ký
Nhu cầu về tốc độ: Nhu cầu về tốc độ dữ liệu cao hơn có thể thúc đẩy quá trình chuyển đổi sang CAN FD, CAN XL hoặc Ethernet ô tô
Hãy liên hệ với SEMIKI để được tư vấn lựa chọn các dòng thiết bị CAN phù hợp với nhu cầu của bạn
LIÊN HỆ:
Công Ty TNHH thiết Bị Đo SEMIKI
Email: [email protected]
Điện thoại : +84 9797 61016









