






CANバス(Controller Area Network)は、車両や機械において、ホストコンピュータを必要とせずにECU(電子制御ユニット)間の通信を可能にする通信システムです。例えば、CANバスは車両のブレーキとエンジン間で高速かつ信頼性の高い情報共有を可能にします。
あなたの車を人間の体のように想像してください。
CANバスは 神経系 コミュニケーションを許可する
一方、ECU(「CANノード」とも呼ばれます)は、CANバスを介して互いに接続され、車体の各部のような役割を果たします。ある部品で検知された情報は、他の部品と共有されます。
物理的には、すべてのECUは、CANハイとCANローの2本のツイストペア線で構成される2線式バスに接続されています。これらの線は通常、色分けされており、CANハイは黄色(太陽に似ている)、CANローは緑(草に似ている)です。

PEAKシステム PCAN-USB CAN USBアダプター

PCAN-USBインターフェースは、CANネットワークへの簡単な接続を可能にします。コンパクトなプラスチック筐体は、ポータブルアプリケーションに最適です。オプトデカップリングバージョンは、PCとCAN側の間で最大500Vのガルバニック絶縁を保証します。CAN接続アプリケーション開発用のPCAN-ViewモニタリングソフトウェアとPCAN-Basicプログラミングインターフェースは、製品に含まれており、CAN FDをサポートしています。各種オペレーティングシステム用のデバイスドライバーが用意されているため、接続されたCANバスにプログラムから簡単にアクセスできます。

電子制御ユニット(ECU)は、エンジン、トランスミッション、ブレーキ、ステアリング、温度など、特定の機能を制御する部品です。現代の自動車には、 70個以上のECU – 各 ECU はバス上の他の ECU と情報を共有します。
CANバス上のどのECUも、情報(例:センサーデータ)を準備し、送信することができます。送信されたデータはネットワーク上の他のすべてのECUによって受信され、各ECUはデータを確認し、受け入れるか無視するかを決定します。
拡大してみると、ECU は次の 3 つの主要コンポーネントで構成されています。


CAN バスに接続するにはどうすればいいですか?
CANバスアプリケーションには標準コネクタがありません。後ほど説明しますが、これは車両や機械によって異なるコネクタが使用される可能性があることを意味します。
ただし、近い候補として、CAN バス データ ロガー/インターフェイスを含む多くのアプリケーションの事実上の標準となっている CAN DB9 (D-sub9) コネクタ (CANopen CiA 303-1) があります。

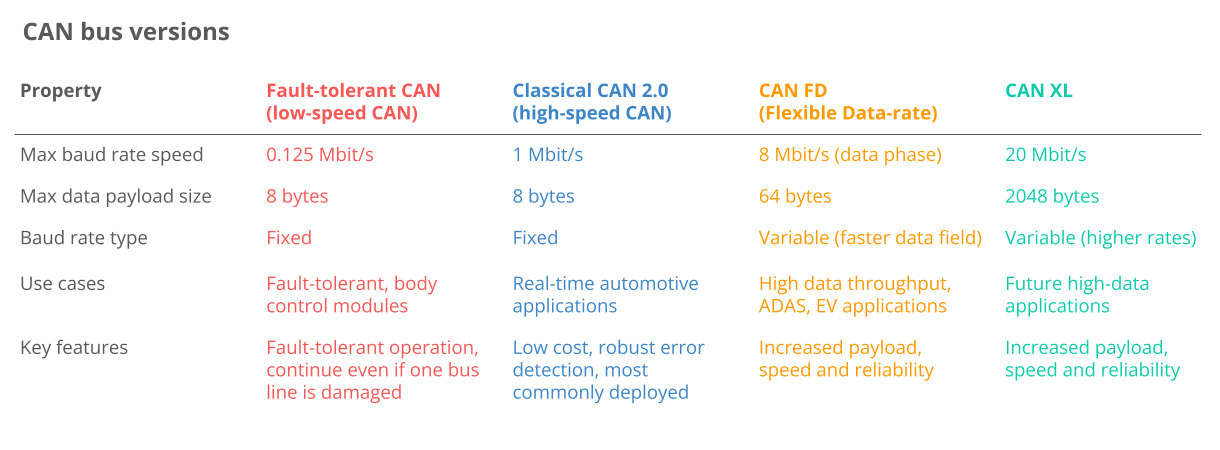
先に進む前に、CAN には多くのバリエーションがあることを知っておく必要があります。
CAN バス規格は、主に次の利点があるため、ほとんどの車両や多くの機械で使用されています。

ECUは複雑な直接アナログ信号パスではなく、単一のCANシステムを介して通信するため、エラー、重量、配線、コストが削減されます。

CANバスは、ネットワーク上のすべてのECUと通信するための「単一のエントリポイント」を提供し、集中診断、データロギング、および構成を可能にします。詳細

このシステムは電磁干渉や電磁干渉に耐性があり、安全性が重要なアプリケーション(車両など)に最適です。詳細

CAN フレームは ID によって優先順位が付けられるため、最も優先度の高いデータは他のフレームを中断することなくすぐにバスにアクセスします。

現在、CANは自動車の標準となっています( 車 , トラック 、バス、トラクターなど)、 船 、 飛行機、 EVバッテリー , 機械 など



将来的には、CANバスプロトコルは、以下の影響を受けるものの、引き続き重要になります。 主要なトレンド :
オープン vs. クローズド: 「オープンソース」の推進と、例えばサブスクリプションベースのマイクロサービスの提供などのためにOEM主導の独自データ要求に対抗する動き
スピードの必要性: より高いデータレートの必要性により、CAN FD、CAN XL、または車載イーサネットへの移行が促進される可能性がある。
ご連絡ください セミキ ニーズに合った適切なCANデバイスラインの選択に関するアドバイス
接触:
セミキ測定器株式会社
Email: [email protected]
電話: +84 9797 61016









